Twój koszyk jest obecnie pusty!
Twoje zapytanie jest naszą motywacją
Twoje zapytanie jest naszą motywacją

Pomimo naszej obszernej wiki nie znalazłeś informacji, których szukałeś? W takim razie nie wahaj się skontaktować z nami bezpośrednio.
Nasz zespół z przyjemnością pomoże Ci osobiście – czy to z konkretnymi aplikacjami, niestandardowymi produktami czy brakującymi treściami. Wspólnie znajdziemy właściwe rozwiązanie.
Autor:
Ostatnia aktualizacja:
Podnośnik śrubowy jest elektromechanicznym napędem, który przekształca ruch obrotowy (rotację) w ruch prostoliniowy (translację). Jego głównym zadaniem jest precyzyjne podnoszenie, opuszczanie, przesuwanie lub pozycjonowanie ładunków. Jest to więcej niż tylko prosty siłownik: jako zintegrowany system do precyzyjnego i bezpiecznego przenoszenia siły, jego konstrukcja pozwala na wysokie wzmocnienie siły i powtarzalną dokładność pozycjonowania.
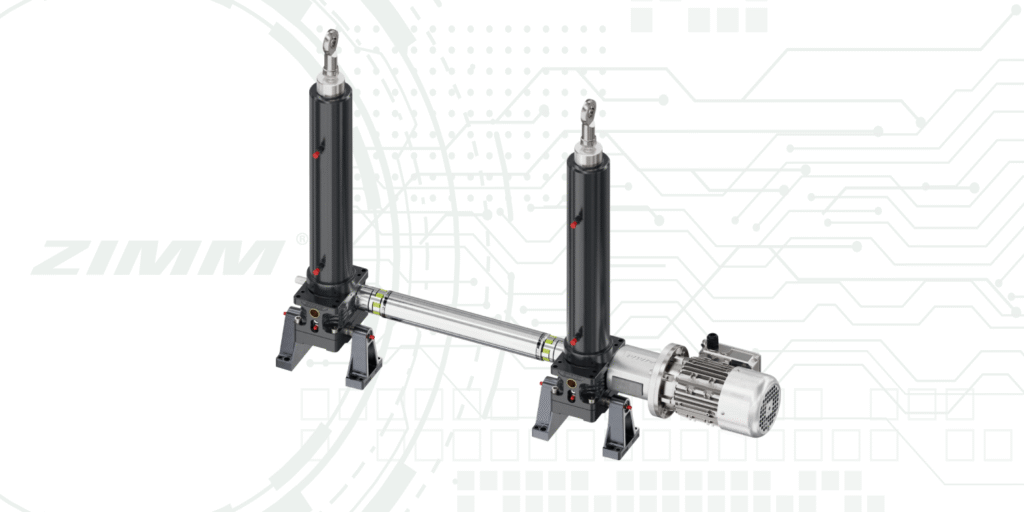
ZIMM oferuje sprawdzone rozwiązania w różnych seriach i rozmiarach – w tym wersję S (śruba stojąca, wysuwana) i wersję R (śruba obrotowa z nakrętką przesuwną) – i tym samym obejmuje szerokie spektrum obciążeń.
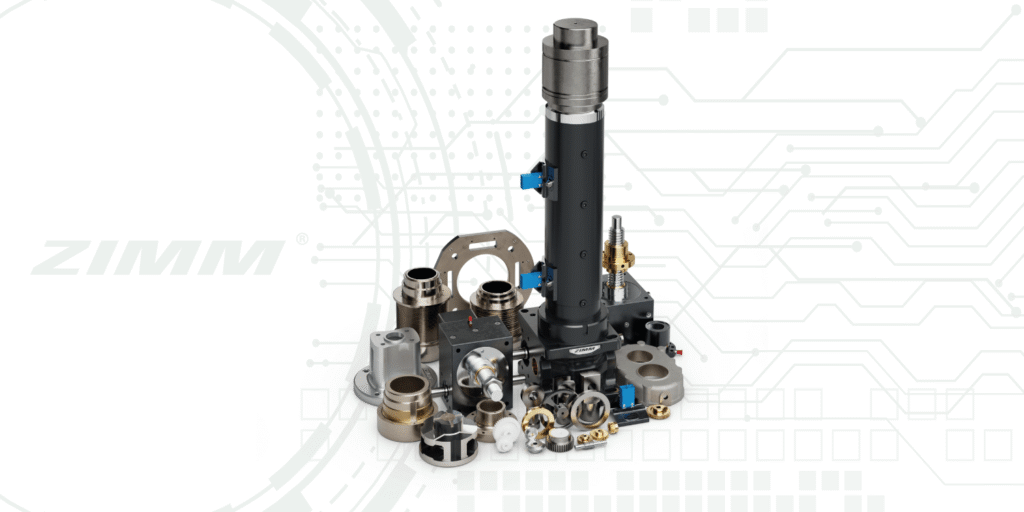
Sercem podnośnika śrubowego jest kilka, solidnych komponentów, umieszczonych w obudowie:
Chroni wewnętrzne komponenty, służy do montażu i wspomaga odprowadzanie ciepła. W ZIMM, w zależności od serii, stosowane są klasyczne formy konstrukcyjne wzorowane na przekładniach ślimakowych, elastyczne w montażu obudowy sześcienne; są one zaprojektowane do wysokiego skupienia siły, cichej pracy i trwałej ochrony przed korozją.
Jest napędzany przez silnik (np. serwo lub asynchroniczny) i przenosi ruch obrotowy na ślimacznicę.
To koło zębate jest obracane przez ślimak. Jest ona od wewnątrz wyposażona w gwint i pełni funkcję precyzyjnie prowadzonej nakrętki dla śruby – jest to podstawa dla bezluzowego, siłowego przekształcenia ruchu liniowego.
Wytwarza właściwy ruch liniowy. W zależności od wymagań stosowane są śruby z gwintem trapezowym (solidne, samohamowne) lub śruby kulowe (o wysokiej wydajności i niskim tarciu) – do precyzyjnego sterowania, powtarzalności i wysokiej sprawności.
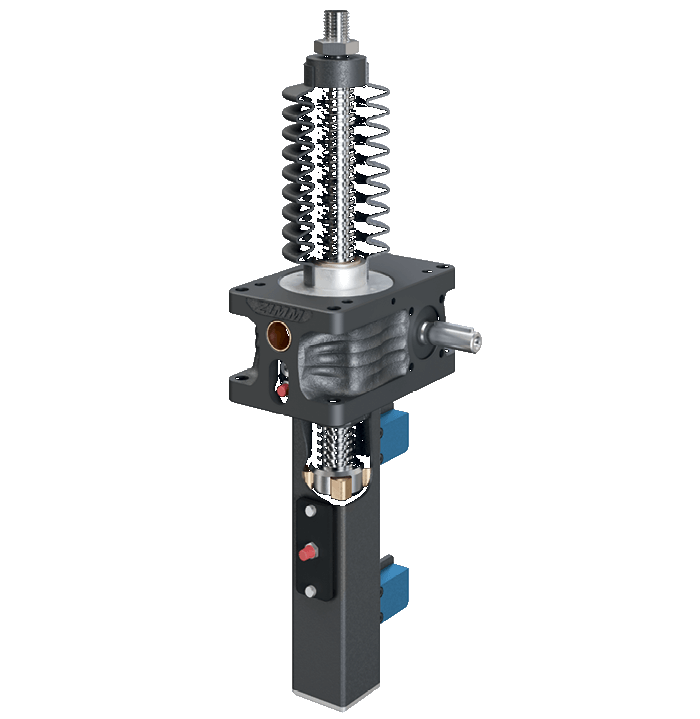
Działanie podnośnika śrubowego opiera się na zasadzie przekładni ślimakowej, która realizuje duże przełożenie w kompaktowej przestrzeni montażowej. Ta konstrukcja jest kluczową cechą wzmocnienia siły: mały, ekonomiczny standardowy silnik może dzięki niej precyzyjnie poruszać dużymi ładunkami – podnosić, opuszczać lub pozycjonować. W terminologii ZIMM rozróżnia się dwa główne warianty, które oba zamieniają ruch obrotowy silnika na liniowy ruch podnoszenia.
Silnik napędza ślimak, który z kolei porusza ślimacznicą w obudowie. Śruba podnosząca jest zabezpieczona przed obrotem (np. przez przymocowane obciążenie) i przesuwa się osiowo w górę lub w dół dzięki obracającemu się gwintowi wewnętrznemu ślimacznicy – śruba wysuwa się z przekładni i chowa z powrotem. Ta wersja jest solidna, samohamowna (w przypadku gwintu trapezowego) i jest pierwszym wyborem dla wielu zadań regulacyjnych.
Tutaj śruba podnosząca jest połączona ze ślimacznicą i obraca się razem z nią. Ruch liniowy przejmuje zewnętrzna nakrętka przesuwna, która porusza się po gwincie śruby, podczas gdy śruba zachowuje swoją pozycję osiową. Ten wariant umożliwia wysokie prędkości podnoszenia i wydajność – zwłaszcza w połączeniu ze śrubami kulowymi – i może być modułowo integrowany z urządzeniami.
To mechaniczne przekształcenie i wzmocnienie czyni podnośniki śrubowe niezawodnym, precyzyjnym i ekonomicznym rozwiązaniem do różnorodnych zastosowań przemysłowych, gdzie wymagana jest kontrolowana siła i dokładne pozycjonowanie. ZIMM uzupełnia to o odpowiednie komponenty bezpieczeństwa i systemowe (np. nakrętką zabezpieczającą, elementami montażowymi z modułowego systemu), dzięki czemu można szybko zrealizować kompletne, skalowalne systemy podnoszenia.


Nasze kompetencje obejmują rozwój i produkcję przekładni przemysłowych począwszy od odpowiednich części osprzętu aż do odlewów, produkcji seryjnej i precyzyjnej obróbki mechanicznej. Oferujemy nie tylko solidne przekładnie, ale także elementy napędowe „szyte na miarę”, wyprodukowane dokładnie według Twoich rysunków i specyfikacji.
Jako wiodący w Europie producent podnośników śrubowych stawiamy na najnowocześniejszy park maszynowy oraz rozbudowane systemy pomiarowe i badawcze. Dzięki temu jesteśmy w stanie samodzielnie wyprodukować niemal wszystkie nasze produkty i zapewnić Państwu zawsze najwyższą jakość.
Niezależnie od zastosowania czy branży – nasze rozwiązania są idealnie dopasowane do Twoich potrzeb. Prześlij swoje zapytanie ofertowe już dziś i usprawnij swoje procesy produkcyjne dzięki naszym elastycznym i konfigurowalnym rozwiązaniom.

Skontaktuj się z naszą doradcą za pomocą formularza. Szybko odpowiemy na Twoje pytanie.

Aby przesłać formularz, należy wczytać treść z reCAPTCHA. Pamiętaj, że spowoduje to udostępnienie danych zewnętrznym operatorom.
Więcej informacji